In this example we show how to generate a mesh for an LDX-like levitated dipole using TokaMaker's built in mesh generation.
- Warning
- Dipole equilibrium support is still in development. Please be careful when using this feature and report any issues.
- Note
- Running this example requires the h5py python packages, which is installable using
pipor other standard methods.
Load TokaMaker library
To load the TokaMaker python module we need to tell python where to the module is located. This can be done either through the PYTHONPATH environment variable or using within a script using sys.path.append() as below, where we look for the environement variable OFT_ROOTPATH to provide the path to where the OpenFUSIONToolkit is installed (/Applications/OFT on macOS).
For meshing we will use the gs_Domain class to build a 2D triangular grid suitable for Grad-Shafranov equilibria. This class uses the triangle code through a simple internal python wrapper within OFT.
Build mesh
Set mesh resolution for each region
First we define some target sizes to set the resolution in our grid. These variables will be used later and represent the target edge size within a given region, where units are in meters.
- Note
- When setting up a new machine these values will need to scale with the overall size of the device/domain. Additionally, one should perform a convergence study, by increasing resolution (decreasing target size) by at least a factor of two in all regions to ensure the results are not sensitive to your choice of grid size.
Define regions and attributes
We now create and define the various logical mesh regions. In the dipole case we have 4 region groups:
air: The region outside the vacuum vesselplasma: The region inside the limiter (vacuum vessel) where the plasma will existvv: The vacuum vesselvacuum: The vacuum region inside the floating coil cryostatfcoil, lcoil: The Dipole (floating) and levitation coils
For each region you can provide a target size and one of four region types:
plasma: The region where the plasma can exist and the classic Grad-Shafranov equation with \(F*F'\) and \(P'\) are allowed. There can only be one region of this typevacuum: A region where no current can flow and \(\nabla^* \psi = 0\) is solvedboundary: A special case of thevacuumregion, which forms the outer boundary of the computational domain. A region of this type is required if more than one region is specifiedconductor: A region where toroidal current can flow passively (no externally applied voltage). For this type of region the resistivity should be specified with the argumentetain units of \(\omega \mathrm{-m}\).coil: A region where toroidal current can flow with specified amplitude through set_coil_currents() or via shape optimization set_coil_reg() and set_isoflux()
- Note
- For a dipole we also we the
inner_limiterargument to true for the vacuum region to mark it as the inner limiter.
Define geometry for region boundaries
Once the region types and properties are defined we now define the geometry of the mesh using shapes and references to the defined regions.
First, we set some geometry values that approximate the LDX device based on D.T. Garnier et al., Fusion Eng. Des. (2006).
Once the region types and properties are defined we now define the geometry of the mesh using shapes and references to the defined regions.
- The plasma region is defined by marking a location in this region
- As the VV goes all the way to the geometric axis we need to define the boundary region explicitly so that the intersection points are present in both the VV and boundary contours.
- The vacuum vessel is then added as a "polygon" with curves defining the inner and outer edges respectively.
- The inner coil case/limiter is defined as a simple circular path
- The dipole is defined using the outline from D.T. Garnier et al.
- The levitation coil is defined as simple rectangles
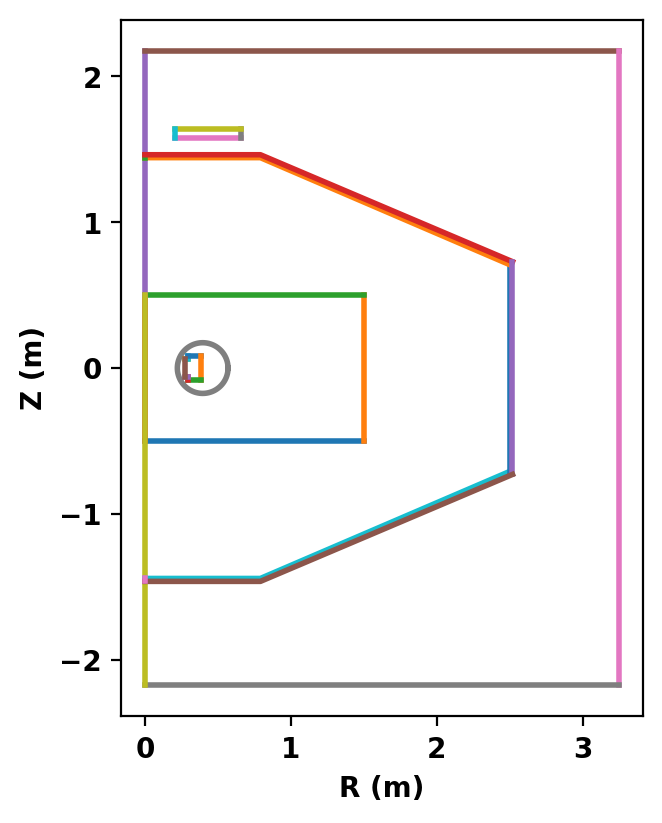
Plot topology
After defining the logical and physical topology we can now plot the curves within the definitions to double check everything is in the right place.
Create mesh
Now we generate the actual mesh using the build_mesh() method. Additionally, if coil and/or conductor regions are defined the get_coils() and get_conductors() methods should also be called to get descriptive dictionaries for later use in TokaMaker. This step may take a few moments as triangle generates the mesh.
Note that, as is common with unstructured meshes, the mesh is stored a list of points mesh_pts of size (np,2), a list of cells formed from three points each mesh_lc of size (nc,3), and an array providing a region id number for each cell mesh_reg of size (nc,), which is mapped to the names above using the coil_dict and cond_dict dictionaries.
Assembling regions: # of unique points = 1104 # of unique segments = 32 Generating mesh: # of points = 8546 # of cells = 16912 # of regions = 6
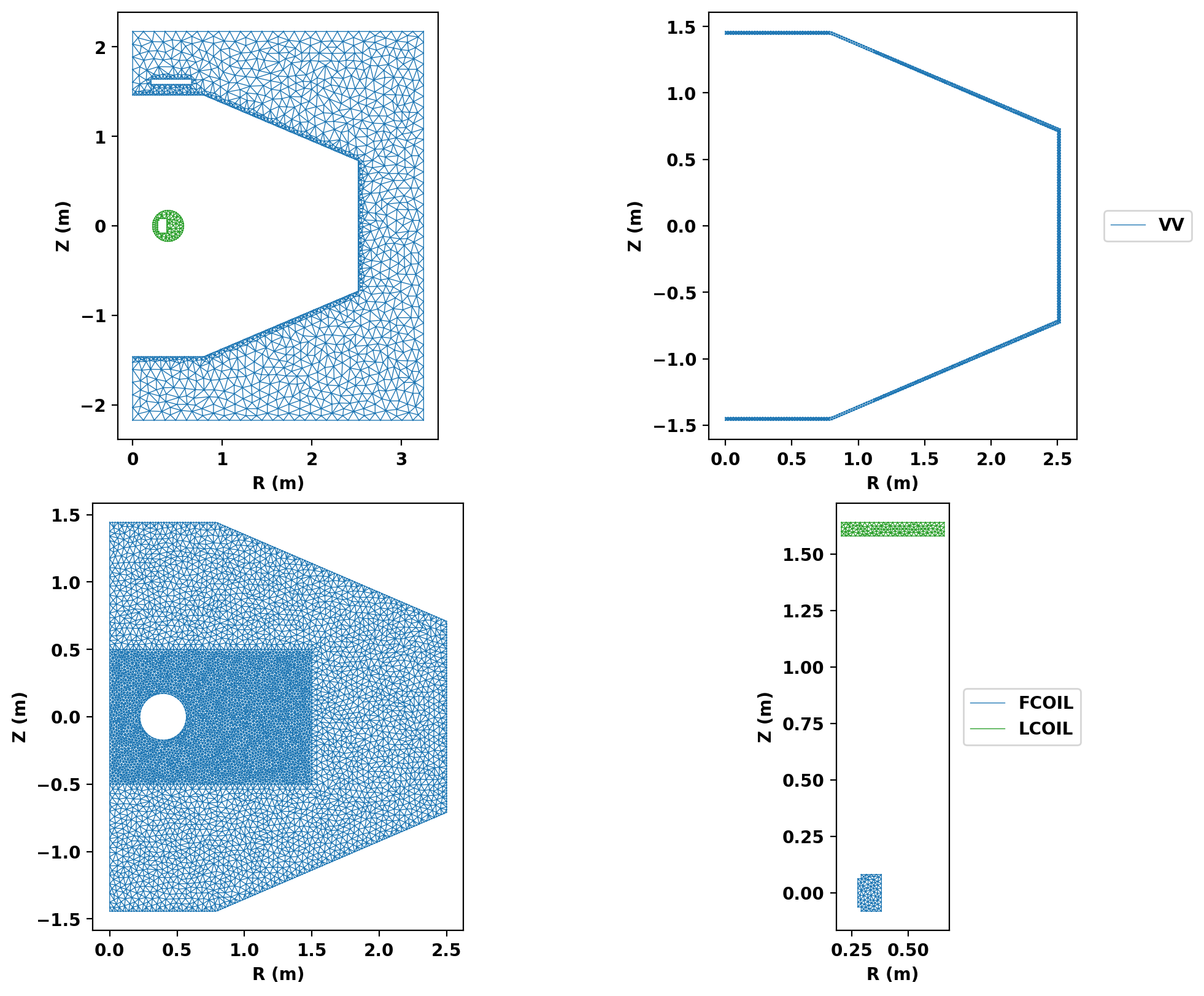
Plot resulting regions and grid
We now plot the mesh by region to inspect proper generation.
Save mesh for later use
As generation of the mesh often takes comparable, or longer, time compare to runs in TokaMaker it is useful to separate generation of the mesh into a different script as demonstrated here. The method save_gs_mesh() can be used to save the resulting information for later use. This is done using and an HDF5 file through the h5py library.